")

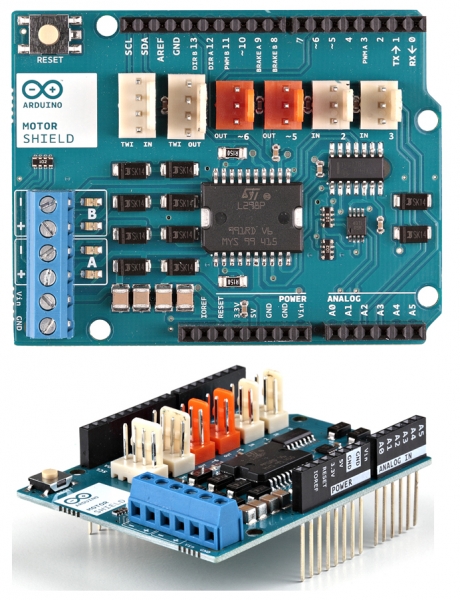
Arduino Motor Shield Rev3

Arduino Motor Shield Rev3
Arduino Motor Shield si basa sull'L298 ( scheda tecnica ), che è un doppio driver a ponte intero progettato per pilotare carichi induttivi come relè, solenoidi, motori CC e motori passo-passo. Ti consente di pilotare due motori DC con la tua scheda Arduino, controllando la velocità e la direzione di ciascuno in modo indipendente. Puoi anche misurare l'assorbimento di corrente del motore di ciascun motore, tra le altre caratteristiche. Lo scudo è compatibile con TinkerKit, il che significa che puoi creare rapidamente progetti collegando i moduli TinkerKit alla scheda.
Iniziare
Puoi trovare nella sezione Per iniziare tutte le informazioni necessarie per configurare la tua scheda, utilizzare il software Arduino (IDE) e iniziare ad armeggiare con la codifica e l'elettronica.
Specifiche tecniche
| Tensione operativa | da 5 V a 12 V |
| Controllore del motore | L298P, aziona 2 motori DC o 1 motore passo-passo |
| Corrente massima | 2A per canale o 4A max (con alimentatore esterno) |
| Rilevamento corrente | 1,65 V/A |
| Funzione di arresto e freno a corsa libera |
Documentazione
SSL: schemi
Arduino Motor Shield è un hardware open source! Puoi creare la tua scheda utilizzando i seguenti file:
Energia
L'Arduino Motor Shield deve essere alimentato solo da un alimentatore esterno. Perché l'IC L298 montato sullo schermo ha due connessioni di alimentazione separate, una per la logica e una per il driver di alimentazione del motore. La corrente del motore richiesta spesso supera la corrente nominale massima USB.
L'alimentazione esterna (non USB) può provenire da un adattatore CA-CC (a muro) o da una batteria. L'adattatore può essere collegato inserendo uno spinotto con positivo centrale da 2,1 mm nel jack di alimentazione della scheda Arduino su cui è montata la schermatura del motore oppure collegando i fili che portano l'alimentazione ai terminali a vite Vin e GND, avendo cura di rispettare le polarità.
Per evitare possibili danni alla scheda Arduino su cui è montato lo scudo, si consiglia di utilizzare un alimentatore esterno che fornisca una tensione compresa tra 7 e 12V. Se il tuo motore richiede più di 9 V ti consigliamo di separare le linee di alimentazione dello scudo e della scheda Arduino su cui è montato lo scudo. Ciò è possibile tagliando il ponticello “Vin Connect” posto sul lato posteriore dello scudo. Il limite assoluto per Vin ai terminali a vite è 18V.
I pin di alimentazione sono i seguenti:
- Vin sulla morsettiera a vite è la tensione di ingresso al motore collegato alla schermatura. Un alimentatore esterno collegato a questo pin fornisce anche alimentazione alla scheda Arduino su cui è montato. Tagliando il ponticello "Vin Connect" si rende questa una linea di alimentazione dedicata per il motore.
- GND Terra sulla morsettiera a vite.
Lo scudo può fornire 2 ampere per canale, per un totale di 4 ampere massimo.
Ingresso e uscita
Questo scudo ha due canali separati, chiamati A e B, che utilizzano ciascuno 4 pin di Arduino per azionare o rilevare il motore. In totale ci sono 8 pin in uso su questo scudo. È possibile utilizzare ciascun canale separatamente per azionare due motori CC o combinarli per azionare un motore passo-passo bipolare. I perni dello scudo, divisi per canale, sono mostrati nella tabella seguente:
| Funzione | perni per cap. UN | perni per cap. B |
| Direzione | D12 | D13 |
| PWM | D3 | D11 |
| Freno | D9 | D8 |
| Rilevamento corrente | A0 | A1 |
Se non hai bisogno del freno e del rilevamento corrente e hai bisogno anche di più pin per la tua applicazione puoi disabilitare queste funzionalità tagliando i rispettivi ponticelli sul lato posteriore dello scudo.
Le prese aggiuntive sullo schermo sono descritte come segue:
- Morsetto a vite per collegare i motori e la loro alimentazione.
- 2 connettori TinkerKit per due ingressi analogici (in bianco), collegati ad A2 e A3.
- 2 connettori TinkerKit per due uscite Aanlog (in arancione al centro), collegati alle uscite PWM sui pin D5 e D6.
- 2 connettori TinkerKit per l'interfaccia TWI (in bianco a 4 pin), uno per l'ingresso e l'altro per l'uscita.
Collegamento motori
Motore DC spazzolato . Puoi pilotare due motori DC con spazzole collegando i due fili di ciascuno nei terminali a vite (+) e (-) per ciascun canale A e B. In questo modo puoi controllarne la direzione impostando HIGH o LOW DIR A e Pin DIR B , è possibile controllare la velocità variando i valori del ciclo di lavoro PWM A e PWM B. I pin Freno A e Freno B , se impostati su ALTO, freneranno efficacemente i motori CC anziché lasciarli rallentare interrompendo l'alimentazione. È possibile misurare la corrente che attraversa il motore CC leggendo i pin SNS0 e SNS1 . Su ciascun canale sarà presente una tensione proporzionale alla corrente misurata, che potrà essere letta come un normale ingresso analogico, attraverso la funzione analogRead() sull'ingresso analogico A0 e A1. Per comodità è calibrato su 3,3 V quando il canale fornisce la massima corrente possibile, ovvero 2 A.
Caratteristiche fisiche
La lunghezza e la larghezza massime del PCB Motor Shield sono rispettivamente 2,7 e 2,1 pollici. Quattro fori per le viti consentono di fissare la scheda a una superficie o a una custodia. Si noti che la distanza tra i pin digitali 7 e 8 è 160 mil (0,16"), non un multiplo pari della spaziatura di 100 mil degli altri pin.
